Corey Lynch
Research Scientist, Robotics at Google
Imitation, Language, Self-supervision
Projects
|
PaLM-E: An Embodied Multimodal Language Model
Danny Driess, Fei Xia, Mehdi S. M. Sajjadi, Corey Lynch, Aakanksha Chowdhery, Brian Ichter, Ayzaan Wahid, Jonathan Tompson, Quan Vuong, Tianhe Yu, Wenlong Huang, Yevgen Chebotar, Pierre Sermanet, Daniel Duckworth, Sergey Levine, Vincent Vanhoucke, Karol Hausman, Marc Toussaint, Klaus Greff, Andy Zeng, Igor Mordatch, Pete Florence. ICML 2023. |
|
|
Interactive Language: Talking to Robots in Real Time
Corey Lynch, Ayzaan Wahid, Jonathan Tompson, Tianli Ding, James Betker, Robert Baruch, Travis Armstrong, Pete Florence. In submission. |
|
|
GoalsEye: Learning High Speed Precision Table Tennis on a Physical Robot
Tianli Ding, Laura Graesser, Saminda Abeyruwan, David B. D'Ambrosio, Anish Shankar, Pierre Sermanet, Pannag R. Sanketi, Corey Lynch. IROS 2022. |
|
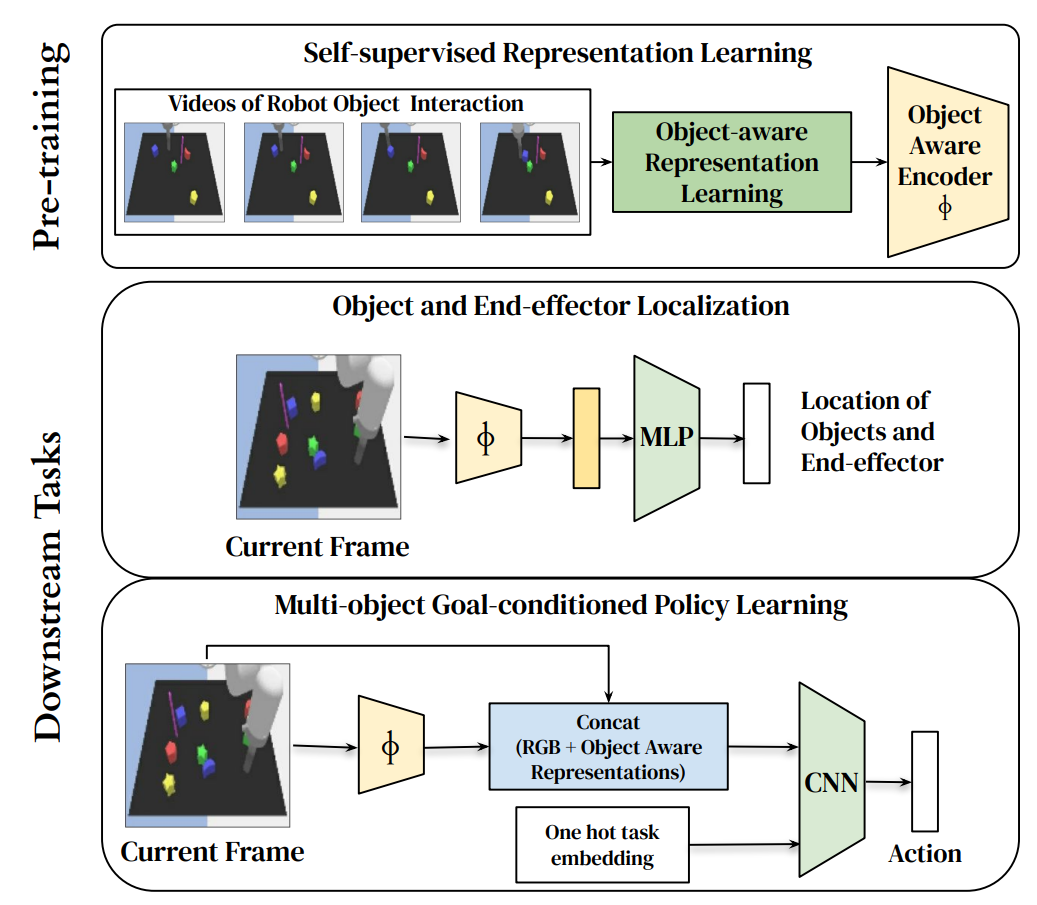 |
Visuomotor Control in Multi-Object Scenes Using Object-Aware Representations
Negin Heravi, Ayzaan Wahid, Corey Lynch, Pete Florence, Travis Armstrong, Jonathan Tompson, Pierre Sermanet, Jeannette Bohg, Debidatta Dwibedi. In submission. |
|
Implicit Behavioral Cloning
Pete Florence, Corey Lynch, Andy Zeng, Oscar Ramirez, Ayzaan Wahid, Laura Downs, Adrian Wong, Johnny Lee, Igor Mordatch, Jonathan Tompson. CORL 2021. |
|
|
Demonstration-Bootstrapped Autonomous Practicing via Multi-Task Reinforcement Learning
Abhishek Gupta, Corey Lynch, Brandon Kinman, Garrett Peake, Sergey Levine, Karol Hausman. In submission. |
|
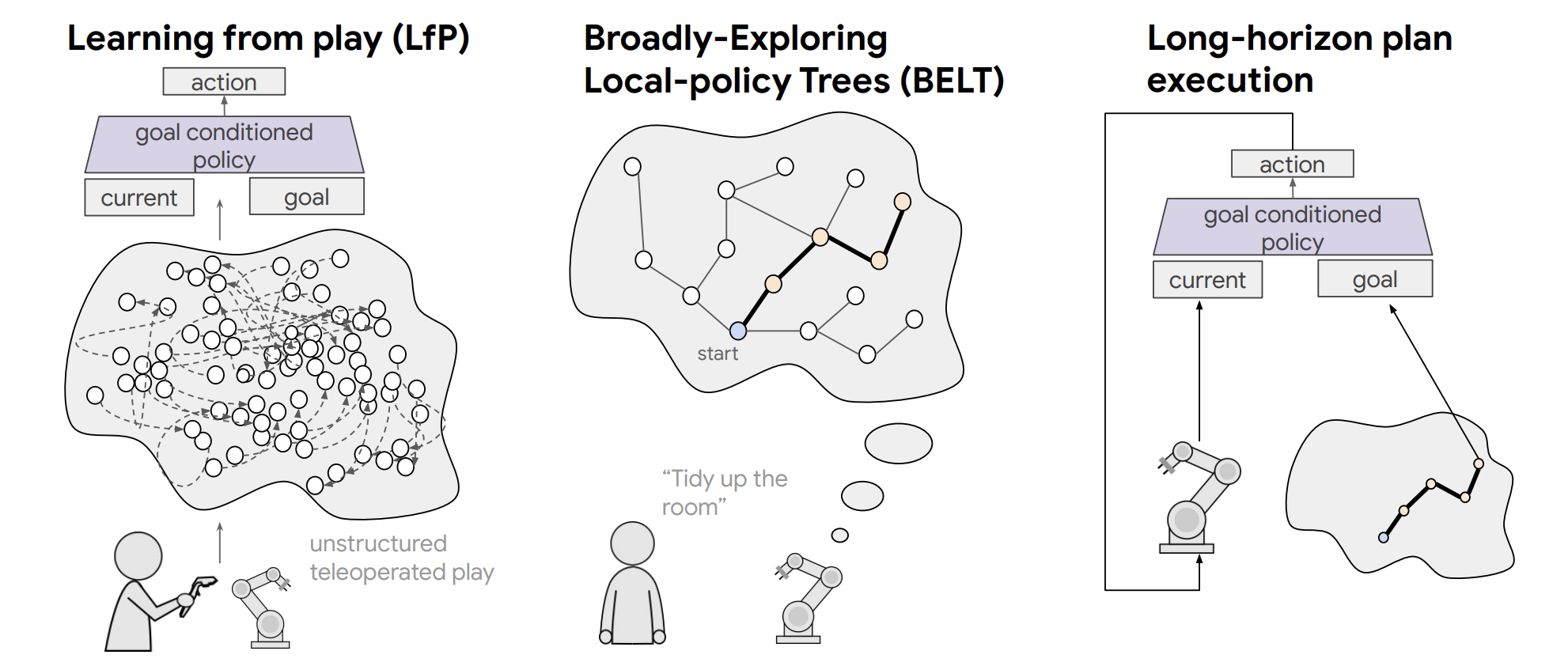 |
Broadly-Exploring, Local-Policy Trees for Long-Horizon Task Planning
Brian Ichter, Pierre Sermanet, Corey Lynch. CORL 2021. |
|
BC-Z: Zero-Shot Task Generalization with Robotic Imitation Learning
Eric Jang, Alex Irpan, Mohi Khansari, Daniel Kappler, Frederik Ebert, Corey Lynch, Sergey Levine, Chelsea Finn. CORL 2021. |
|
|
Language Conditioned Imitation Learning over Unstructured Data
Corey Lynch and Pierre Sermanet, RSS 2021. |
|
|
Relay Policy Learning: Solving Long-Horizon Tasks via Imitation and Reinforcement Learning
Abhishek Gupta, Vikash Kumar, Corey Lynch, Sergey Levine, Karol Hausman. CORL 2019, oral presentation. |
|
|
Learning Latent Plans from Play
Corey Lynch, Mohi Khansari, Ted Xiao, Vikash Kumar, Jonathan Tompson, Sergey Levine, Pierre Sermanet. CoRL 2019, oral presentation. |
|
|
Self-Supervised Actionable Representations
Debidatta Dwibedi, Jonathan Tompson, Corey Lynch, Pierre Sermanet. IROS 2018. |
|
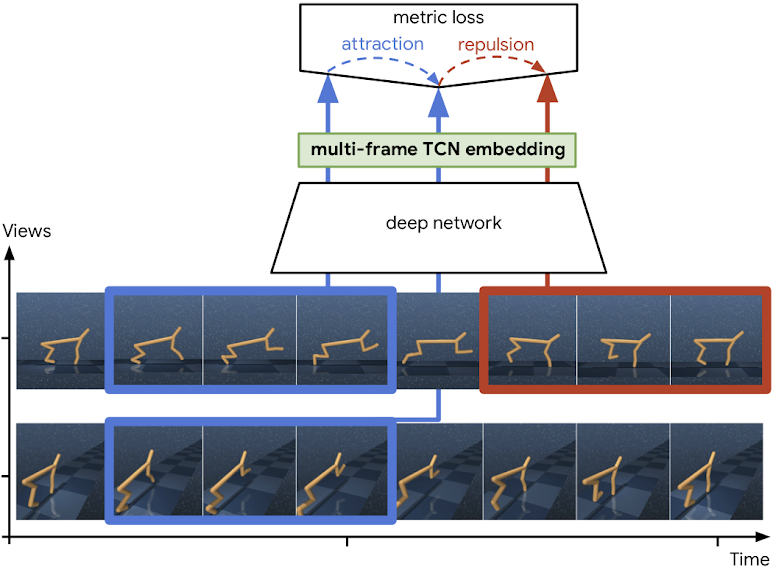
Time-Contrastive Networks (TCN)
Pierre Sermanet*, Corey Lynch*, Yevgen Chebotar*, Jasmine Hsu, Eric Jang, Stefan Schaal, Sergey Levine. ICRA 2018. |
Patents
Corey Lynch, Pierre Sermanet, Seyed Mohammad Khansari Zadeh. Controlling Agents Using Latent Plans, U.S. Patent No. US20220076099A1 (2020) (pending)
Soeren Pirk, Yunfei Bai, Seyed Mohammad Khansari Zadeh, Corey Lynch, Pierre Sermanet. Training a deep neural network model to generate rich object-centric embeddings of robotic vision data, U.S. Patent No. US20210334599A1 (2019) (pending)
Pierre Sermanet, Corey Lynch, Yevgen Chebotar. Optimizing policy controllers for robotic agents using image embeddings, U.S. Patent No. US20200276703A1 (2018) (pending)